現在以下のマニュアルが公開中
公式サイトで公開されている実用的な資料の日本版はクリックガイドのみです。取扱説明書は発売と同時に英語版が公開されて、その数か月後に日本語版が出るはず。
- Mavic Air 2 クイックスタートガイド v1.0
- Mavic Air 2 免責事項と安全に関するガイドライン v1.0
- Mavic Air 2 リリースノート
- Mavic Air 2 ユーザーマニュアル(英語説明書)
まず必要なものはスマホ用のアプリDJIFKLY
本体を飛ばすにあたっては操縦アプリは必須。特に初回のアクティベートはアプリと通信環境(wifiや4Gなど) が必要になる。コントローラーとアプリ経由で最新ファームを自動的にインストールした後に飛ばせるようになります。
以下よりDJIFLYアプリをインストールします。IOS用とandroid用があります。インターフェースはスマホの画面に最適化されており、タブレットは拡大表示となる。インストールは無料。
DJIFLYのダウンロードはこちら
ドローン用のアプリは複数ありますが、現在のところAir2はDJIFLYでしか飛ばせない。不具合情報のほとんどないiphone(6以上) がお勧めですが、androidでもほとんどの機種では大丈夫。
![]()
ケアリフレッシュはこちら
DJIマビックミニケアリフレッシュはこちら↓

マビックエアー2は11,000円の登録費用。使用時は初回9900 円、2回目の交換費用は 12900円となります。個人的には必須レベルのプランです。墜落しても二万円の費用で代替機種と交換できる計算になる。なるべく加入するのがベター。
初回アクティベート作業後96時間以内にDJIのページよりケアリフレッシュに登録してください。
シリアルナンバーが必要になりますが、バッテリーを抜いた本体部分に記載されています。もしくは元箱の蓋のシールにも記載。
エアロエントリー無料損害賠償保険もぜひ
無料の保険–DJI機はエアロエントリーの保険に一年間無料で入れる。この保険は第三者に対して損害を与えたときの保険で、機体の保険ではない。シリアルナンバーが必要になるが、元箱もしくはバッテリーを抜い部分に書かれている。 ドローンの飛行場所などでは保険加入が条件になっていたりするので ぜひ加入を。

アクティベート前にまず充電
アクティベート作業は最新ファームのダウンロードとインストールに10分から20分かかるので接続する前にバッテリーを充電しておく必要があります。本体とコントローラーの両方の充電を済ませておく。

本体バッテリーは3本順番に充電する。満充電までは最長で1:40分。送信機は付属充電器でなくてもUSB電源なら何でも使える。
ちなみに、Air2のバッテリーは放電機能があり充電後数日使用しない場合は自動放電をする(満充電状態が長く続くと劣化するため)。
飛ばす前にプロペラ

プロペラは回転方向が違う二種類が入っている。それぞれ別の袋に入っているので注注意。残りは予備です。comboの場合はそれぞれ6枚、計12枚です。
取り付ける際はバネを押し込んで捻ると固定されます。プロペラには銀色マークがあるのと無いのがあります。銀色と無印は回転方向が違うのです。
マビックエアー2チュートリアル準備編(英語版)
Mavic Air 2 | Unboxing and Setup – YouTube
この動画をもとに飛行準備までの説明をします。まず一度動画の確認をお勧めします。






これで飛行準備は完了です。外に持ち出して飛ばしましょう。注意すべきはケアリフレッシュです。アクティベートしたら96時間以内に契約してください。
マビックエアー2 飛行編
この動画を参考に手順を書いていきます。


飛行

この状態でGPSの受信を始めます。GPS数が10以上になるまで待ちます。10を超えるとこの場所をホームポイントに設定します。GPSが足りない状態だと制限飛行になり、飛行距離と高度が規制されますので注意してください。







撮影方法




RTH リターントゥホーム

RTHは飛び始めた地点に戻ってくるボタンです。自動帰還が可能です。
ただし、自動飛行になるので障害物に接触する可能性もあるので、理想は自分で操縦して戻すことです。
RTHの地点はアプリで変更も可能です。
以下、マビックエアー2の詳細な説明
マビックエアー2のフライトモード
Mavic Air 2には3つのフライトモードと、特定のシナリオで航空機が切り替える4番目のフライトモード(ATTIモード)があります。リモコンのフライトモードスイッチでフライトモードを切り替えることができます。 フライトコントローラーの真ん中に切り替えスイッチがあります。
※離陸時は強制的にノーマルモードになっています。スイッチ動作で切り替えると反映されます。
ノーマル(通常)モード
ポジショニング(通常)モードではGPSと前方、後方、下方のビジョンシステムおよび赤外線検知システムを利用して、航空機自体の位置を特定し安定させます。 GPS信号が強い場合、航空機はGPSを使用して自身の位置を特定し、安定させます。 GPSが弱く、照明条件が十分である場合はドローンはビジョンシステムを使用して自身の位置を特定し、安定させます。前方、後方、および下方ビジョンシステムが有効で、照明条件が十分である場合、最大飛行高度角は20°、最大飛行速度は12 m / sです。
スポーツモード
スポーツモードでは、航空機は測位にGPSを使用し、航空機の応答は俊敏性と速度に合わせて最適化されているため、スティックの動きの制御に対してより応答性があります。最大飛行速度は19 m / sです。スポーツモードでは障害物検知が無効になります。
トライポッド(三脚)モード
三脚モードは通常モードに基づいており、飛行速度が制限されているため、撮影中の航空機の安定性が向上します。
ATTIモード
ビジョンシステムが使用できないか無効になっている場合、およびGPS信号が弱い場合やコンパスが干渉を受けている場合、航空機は自動的に姿勢(ATTI)モードに変わります。 ATTIモードでは、航空機は周囲の影響を受けやすくなります。風などの環境要因により水平シフトが発生する可能性があり、特に限られたスペースを飛行する場合に危険が生じる可能性があります。
自動的に切り替わる意図的にATTIモードにはできません。主に室内飛行ではこのモードになります。
RTH リターントゥホーム
リターントゥホーム(RTH)機能とは記録されたホームポイントに航空機を帰還させる機能があります。 RTHには、スマートRTH、低バッテリーRTH、フェイルセーフRTHの3つのタイプがありそれぞれ微妙に違います。ボタンやアプリで作動させることが可能ですが、例えば飛行中に送信機とのビデオリンク信号が失われた場合、RTHを開始するよう求めるプロンプトが表示されます。 RTHは途中でキャンセルも可能です。送信機のHボタンの長押しと、アプリでのキャンセルが可能です。
デフォルトのホームポイントは、航空機が強力なGPS信号を受信した最初の場所です(白いGPSアイコンには少なくとも4つのバーがあります)。ホームポイントが記録されると、機体ステータスインジケーターが緑色にすばやく点滅します。
スマートRTH
GPS信号が十分であれば、スマートRTHを使用して航空機をホームポイントに戻すことができます。スマートRTHは、DJI Flyをタップするか、ビープ音が鳴るまでリモートコントローラーのRTHボタンを押し続けて開始します。 DJI Flyをタップするか、リモートコントローラーのRTHボタンを押して、Smart RTHを終了します。
スマートRTHには、直線RTHと省電力RTHが含まれます。
スマートRTH手順
1.ホームポイントが記録されます。
2.スマートRTHがトリガーされます。
3. a。 RTH手順の開始時に航空機がホームポイントから20 mを超えている場合、航空機は方向を調整し、事前設定されたRTH高度に上昇して、ホームポイントまで飛行します。現在の高度がRTHの高度よりも高い場合、航空機は現在の高度でホームポイントまで飛行します。
b。 RTH手順の開始時にがホームポイントから5 m〜20 mの距離にある場合、航空機は 航空機方向を調整し、現在の高度でホームポイントに飛行します。
c。 RTHの手順が開始したときに、航空機がホームポイントから5 m未満の場合、航空機はすぐに着陸します。
4.ホームポイントに到達すると、航空機が着陸し、モーターが停止します。
DJIフライによってRTHがトリガーされ、航空機がホームポイントから5 mを超えている場合、アプリに着陸オプションを選択するためのプロンプトが表示されます。
フューエルセーフRTH手順
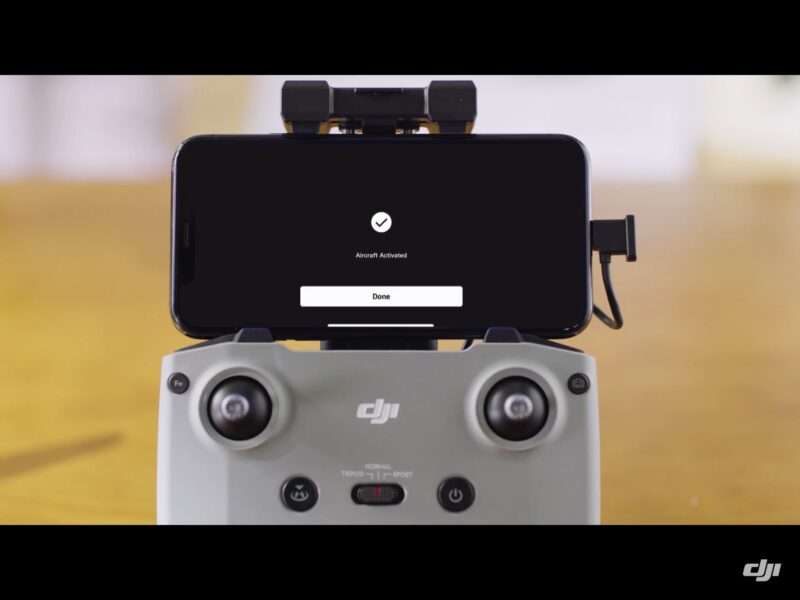
スマートRTH中に、距離が遠すぎ、ホームポイントからの高度が高すぎる場合、航空機は電力を節約するためにフューエルセーフRTHに入ります。
省電力RTHは自動的に起動します。最適な距離と角度(水平方向に16.7°)を計算し、ホームポイントまで飛行します。航空機がホームポイントの50 m上に到達すると着陸し、着陸後にモーターが停止します。
この機能はスマートRTHではバッテリーがやばいと判断された場合に自動的に切り替わる機能で、要するに上昇と横移動を斜めに飛ぶことで多少のバッテリーを節約できる機能です。
ローバッテリーRTH
ローバッテリーRTHは飛行距離とバッテリーの残量を計算して安全な帰還が影響を受ける可能性がある場合に自動的に期間を促す機能です。プロンプトが表示されたら、すぐに家に帰る必要があります。注意すべきは自動計算のよる限界距離なので帰還が向かい風の場合はホームポイントまで戻れない可能性があるので注意してください。
バッテリー残量が少なくなると、DJI Flyは警告を表示します。 10秒のカウントダウン後にアクションが実行されない場合、航空機は自動的にホームポイントに戻ります。
ユーザーは、リモコンのRTHボタンまたはアプリの中止ボタンを押すことでRTHをキャンセルできます。バッテリー残量低下の警告の後にRTHがキャンセルされた場合はホームポイントまで戻れない可能性があります。ホームポイントに自動着陸は中は機体の方向だけ操作可能です。
フェイルセーフRTH
ホームポイントが正常に記録され、コンパスが正常に機能している場合、リモートコントローラー信号が11秒以上失われた後、フェイルセーフRTHが自動的にアクティブになります。元の飛行ルートを50 m後方に飛行し(3Dマップを利用し障害物などを避けながら飛行)、その後、スマートRTHに入ります。
1.航空機がホームポイントから距離20 m未満の場合、現在の高度でホームポイントに戻ります。
2.航空機がホームポイントから20 m以上離れていて、現在の高度が事前設定されたRTHよりも高い場合 は現在の高度でホームポイントに戻ります。
3.航空機がホームポイントから20 mを超えていて、現在の高度が事前設定されたRTHよりも低い場合は、事前設定されたRTH 高度高度に上昇してから、ホームポイントに戻ります。
RTH中の障害物回避
RTH起動時の動作
1.、前方に障害物が感知されている場合は安全な距離にまで上昇して障害物をよけて自動飛行します。
2.後方に障害物が感知さている場合は安全な距離にまで前方に飛行し上昇を続けて自動帰還します。
3.機体下部に障害物を検知した場合、何も動作しません。
航空機が前方に飛んでいるとき
1.から障害物が感知されたときに航空機がブレーキをかけ、後方に下がって安全な距離を確保します。その後5 mは上昇を続け、その後、前方に飛び続けます。
2.後方から障害物を感知した場合、動作しません。
3.航空機は下から障害物が感知されるとブレーキをかけ、に前に障害物が感知されなくなるまで上昇 前方飛ぶします。
RTH中は、航空機の両側または上方にある障害物を検出または回避できません。 RTHで上昇する場合、操縦桿を動かして加速または減速する場合を除き、制御できません。
GPS信号が弱いか利用できない場合、航空機はホームポイントに戻ることができません。 RTHがトリガーされた後にGPS信号が弱くなるか利用できなくなった場合、航空機は着陸する前にしばらく待機します。
各フライトの前に適切なRTH高度を設定することが重要です。 DJI Flyを起動し、RTH高度を設定します。
前方および後方ビジョンシステムが利用できない場合、航空機はフェイルセーフRTH中に障害物を回避できません。 RTH中、航空機の速度と高度は、リモートコントローラーの信号が正常であれば、リモートコントローラーまたはDJI Flyを使用して制御できます。ただし、航空機の向きと飛行方向は制御できません。ユーザーがピッチスティックを押して加速し、飛行速度が12 m / sを超えると、航空機は障害物を回避できません。航空機がRTH中にGEOゾーンに飛行すると、GEOゾーンを出てホームポイントに移動するまで降下するか、所定の位置にホバリングします。風速が高すぎると、航空機がホームポイントに戻ることができない場合があります。注意して飛んでください。
着陸保護
着陸保護は、スマートRTH中にアクティブになります。
1.着陸保護中、航空機は自動的に検出し、適切な地面に着陸します。
2.地面が着陸に適さないと判断された場合、Mavic Air 2はホバーし、パイロットの確認を待ちます。
3.着陸保護が機能していない場合、航空機が降下と、DJI Flyは着陸のプロンプトを表示します
0.5 m未満にで着陸保護が発動します。スロットルスティックを引き下げるか、自動着陸スライダーを使用して着陸します。 下に入れ続けると着陸。
着陸保護は、低バッテリRTHおよびフェイルセーフRTH中にアクティブになります。航空機は次のように動作します。低バッテリーRTHおよびフェイルセーフRTHの間、航空機は地上2 mでホバリングし、パイロットが着陸するのに適していることを確認するのを待ちます。スロットルを1秒間引き下げるか、アプリの自動着陸スライダーを使用して着陸します。着陸保護が作動し、航空機は上記の手順を実行します。
着陸中、ビジョンシステムは無効になります。航空機は注意して着陸してください。
精密着陸
航空機は自動的にスキャンし、RTH中に以下の地形の特徴と一致させようとします。現在の地形がホームポイントの地形と一致すると、航空機が着陸します。地形の一致が失敗すると、DJI Flyにプロンプトが表示されます。
着陸保護は、精密着陸中にアクティブになります。
プレシジョンランディングのパフォーマンスは、次の条件の影響を受けます
。ホームポイントは離陸時に記録する必要があり、飛行中に変更してはなりません。そうしないと、 地形フィーチャの記録がありません。
b。離陸中、航空機は水平に移動する前に垂直に7 m上昇する必要があります。
c。ホームポイントの地形フィーチャは、ほとんど変更されないままにする必要があります。
d。ホームポイントの地形フィーチャは、十分に区別できるものでなければなりません。
e。照明条件は、明るすぎたり暗すぎたりしてはいけません。
プレシジョンランディングでは、次のアクションを実行できます
。スロットルスティックを下に押すと着陸が加速します。
b。コントロールスティックを任意の方向に動かして、プレシジョンランディングを停止します。
ビジョンシステムについて
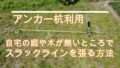
Mavic Air 2には、赤外線センサーシステムと、前方、後方、および下方ビジョンシステムの両方が装備されています。
前方、後方、下方ビジョンシステムはそれぞれ2台のカメラで構成され、赤外線検知システムは2つの3D赤外線モジュールで構成されます。
下方ビジョンシステムと赤外線検知システムは、航空機が現在の位置を維持し、より正確にホバーし、屋内やGPSが利用できない他の環境で飛行するのに役立ちます。
さらに、航空機の下側にある補助ボトムライトは、弱い光の状況下での下方ビジョンシステムの視認性を向上させます。

後方ビジョンシステム:検出範囲:0.37-23.6 m; FOV:57°(水平)、44°(垂直)
下向きビジョンシステム:下向きビジョンシステムは、航空機の高度が0.5〜30 mで、動作範囲が0.5〜60 mのときに最適に機能します。
インテリジェントフライトモード
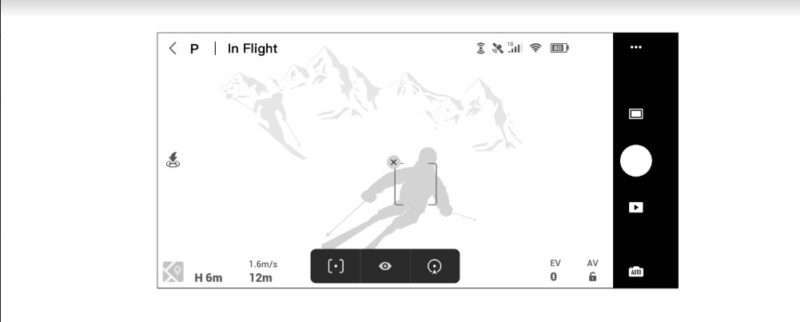
フォーカストラック
フォーカストラックには、Spotlight 2.0、Active Track 3.0、およびPoint of Interest 3.0が含まれています。 この機能はカメラを被写体に向け続ける機能群です。いわゆるアクティブトラックという機能です。
Spotlight 2.0
この便利なモードでは、カメラが被写体に固定されたまま自由に飛行できます。ロールスティックを動かして被写体を回り込み、ピッチスティックを動かして被写体からの距離を変更し、スロットルスティックを動かして高度を変更し、パンスティックを動かしてフレームを調整します。
ActiveTrack 3.0
ActiveTrack 3.0には2つのモードがあります。ロールスティックを動かして被写体を回り込み、ピッチスティックを動かして被写体からの距離を変更し、スロットルスティックを動かして高度を変更し、パンスティックを動かしてフレームを調整します。
1.トレース:ドローンは一定の距離で対象を追跡します。通常モードおよびトライポッドモードでは、最大飛行速度は8 m / sです。ピッチスティックの動きがある場合、航空機はこのモードで障害物を感知して回避できることに注意してください。ロールとスロットルスティックの動きがある場合、航空機は障害物を回避できません。スポーツモードでは、最大飛行速度は19 m / sで、航空機は障害物を感知できません。
2.平行:航空機は一定の角度と側面からの距離で対象を追跡します。通常モードおよび三脚モードでは、最大飛行速度は12 m / sです。スポーツモードでは、最大飛行速度は19 m / sです。航空機は平行して障害物を感知できません。
対象地点3.0(POI 3.0):ドローンは、設定された半径と飛行速度に基づいて、対象を円で追跡します。このモードは、静的な被写体と動く被写体の両方をサポートします。被写体の動きが速すぎると、追跡できない場合があります。
FocusTrackの使用 方法
1.離陸して、地上3.3フィート(1 m)以上でホバリングします。
2.カメラビューで被写体の周りにボックスをドラッグして、FocusTrackを有効にします。
3. FocusTrackが開始します。デフォルトのモードはSpotlightです。アイコンをタップして、Spotlight、ActiveTrackを切り替えます
4.シャッター/記録ボタンをタップして、写真を撮るか、記録を開始します。
FocusTrackを終了方法
するDJI FlyでStopをタップするか、リモートコントローラーの[Flight Pause]ボタンを1回押して、FocusTrackを終了します。
FocusTrackは、人、動物、小さいまたは細かい物体(木の枝や電線など)、または透明な物体(水やガラスなど)がある場所では使用しないでください。
航空機周辺の物体に注意し、航空機との衝突を避けるためにリモートコントローラーを使用してください。航空機を手動で操作します。緊急時には、フライト一時停止ボタンを押すか、DJI Flyでストップをタップします。次のような状況でFocusTrackを使用する場合は、特に注意してください。追跡された対象は、水平な平面上を移動していません。
クィックショット

QuickShotsの撮影モードには、ドローニー、ロケット、サークル、ヘリックス、ブーメラン、およびアステロイドが含まれます。 Mavic Air 2は、選択した撮影モードに従って記録し、短いビデオを自動的に生成します。
回転方向を選んだり、距離を設定することが可能です。選んだ被写体はゆっくりした動きなら追尾しますが、急激な動きは追従できません。また、動く被写体の場合カメラの動きが多少カクつくことがあります。
ハイパーラプス

ハイパーラプスは数秒ごとに静止画を撮影し、動画として合成する機能です。ゆっくりドローンが動きながら撮影することで、非常に特徴的な動画を撮影することができます。完全自動で撮影されますが、その動きをいくつか指定することが可能です。
フリー
ドローンが自動的に写真を撮り、タイムラプスビデオを生成します。離陸後、リモコンを使用して航空機の動きとジンバル角度を制御します
コントローラ。 Freeを使用するには、以下の手順に従ってください。
1.インターバル時間、ビデオの長さ、および最高速度を設定します。画面に表示される写真の数が表示されます
2.シャッターボタンをタップして撮影を開始します。
サークル
コースロックは2つの方法で使用できます。最初の方法では、航空機の向きは固定されていますが、選択できません。 2番目の方法では、航空機の向きが固定され、航空機が
選択したオブジェクト。コースロックを使用するには、以下の手順に従います。
1.インターバル時間、ビデオの長さ、および最高速度を設定します。画面に表示される写真の数が表示されます。
2.飛行方向を設定します。
3.該当する場合、件名を選択します。ジンバルダイヤルとパンスティックを使用して、フレームを調整します。
4.シャッターボタンをタップして開始します。チルトスティックとロールスティックを動かして、水平飛行速度と
航空機を平行に動かします。垂直飛行速度を制御するには、スロットルスティックを動かします。
ウェイポイント
ドローンが自動的に2〜5つのウェイポイントの飛行経路で写真を撮り、タイムラプスを生成します
航空機はウェイポイント1から5、または5から1の順に飛行できます。ウェイポイントを使用するには、以下の手順に従ってください。
1.目的のウェイポイントとレンズ方向を設定します。
2.インターバル時間、ビデオの長さ、および最高速度を設定します。画面に表示される写真の数が表示されます。
3.シャッターボタンをタップして開始します。
航空機はタイムラプスビデオを自動的に生成し、再生で見ることができます。
最適なパフォーマンスを得るには、高度50 m以上でHyperlapseを使用することをお勧めします。インターバル時間とシャッターの間に少なくとも2秒の差を設定します。
静的な被写体(高層ビル、山岳地形など)を選択することをお勧めします。航空機からの安全な距離(15 m以上)。近すぎる被写体は選択しないでください
※ハイパーラプス中に障害物が検出されると、航空機はブレーキをかけ、ホバリングします。
アドバンスドパイロットシステム(APAS 3.0)
Advanced Pilot Assistance Systems 3.0(APAS 3.0)機能は、通常モードで使用できます。 APASが有効にすると、ドローンは自動的に障害物を避けて進行方向に飛行します。
ピッチスティックを前または後ろに動かし続けまるとドローンは上から迂回したり、下、または障害物の左側または右側に自動的にずれて飛行します。
APASが有効になっている場合、リモコンのフライト一時停止ボタンを押すと、航空機を緊急停止させることができます。
コントローラ、またはDJI Flyの画面で[停止]をタップします。航空機は3秒間ホバリングします。
APASを有効にするには、DJI Flyを開き、[システム設定]> [安全性]に移動して、APASを有効にします。
現在、その他の設定等追加記載します
げんざい編集中です。